Master Thesis: Implementation of a Piezoelectric Device for Localized Haptic Feedback
My master thesis was about the implementation of a piezoelectric device for localized haptic feedback. In current smartphones either linear resonant actuators (LRA) or eccentric rotating masses (ERM) are used. With these two motors and its rigid connection within a smartphone it is not possible to create vibrations on a specific point. The thesis covered the points human perception of touch, psycho physics, related work in haptics, piezoelectric fundamentals, evaluation of a hardware and proof of concept with a hardware, firmware and software.
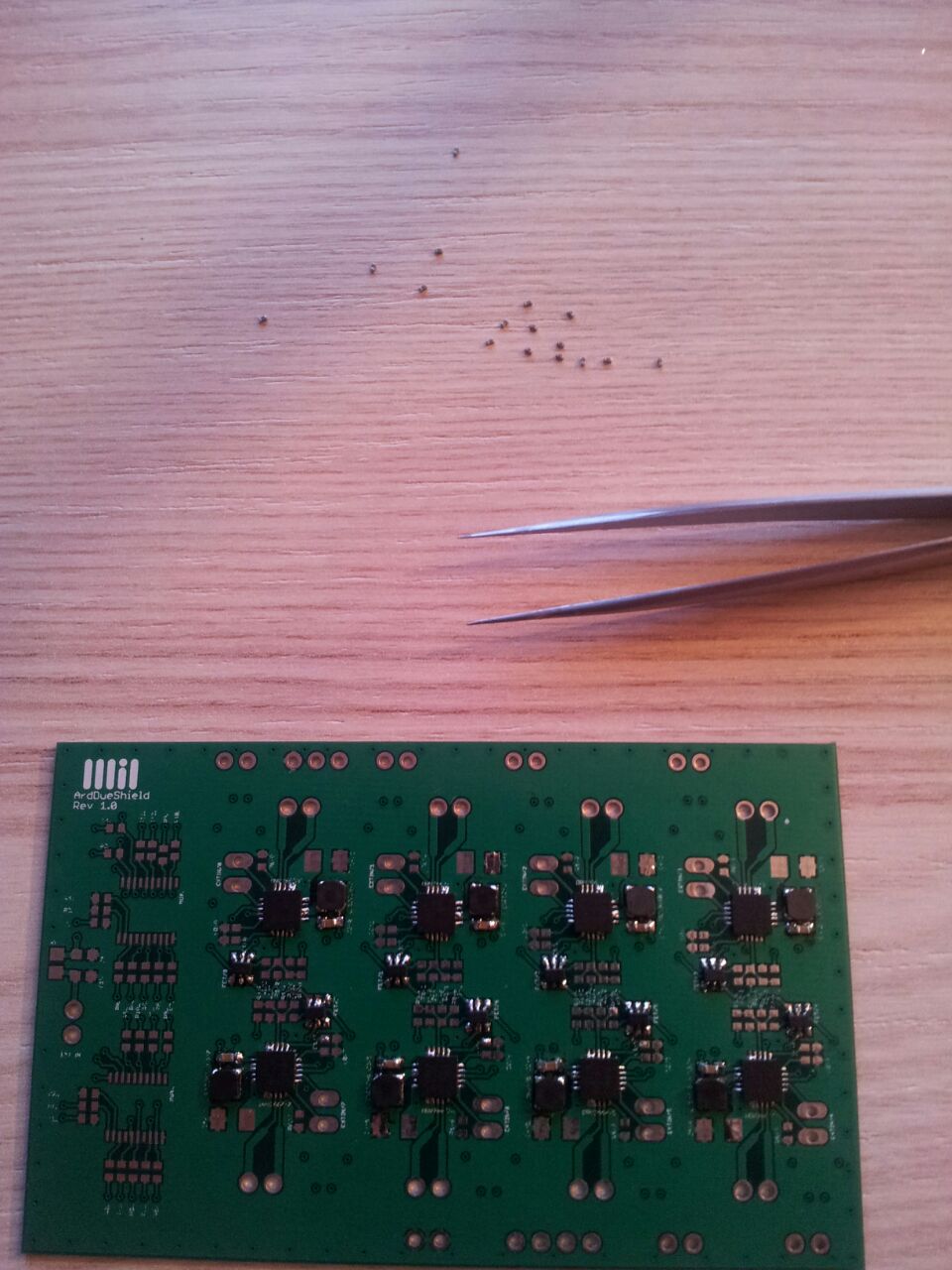
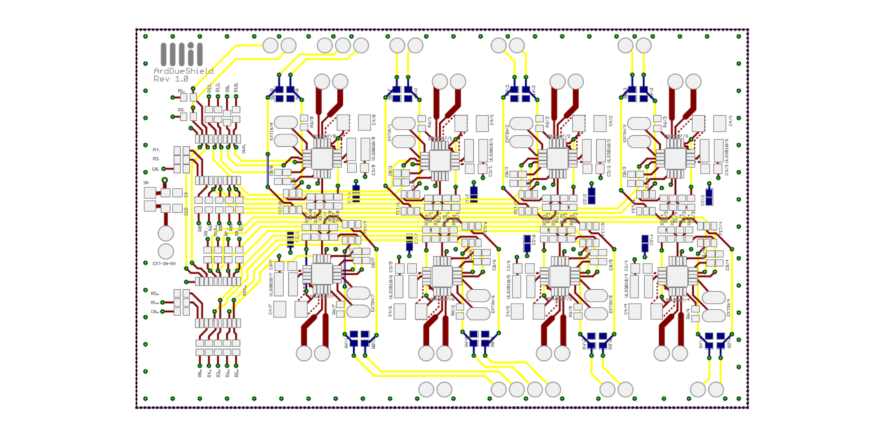
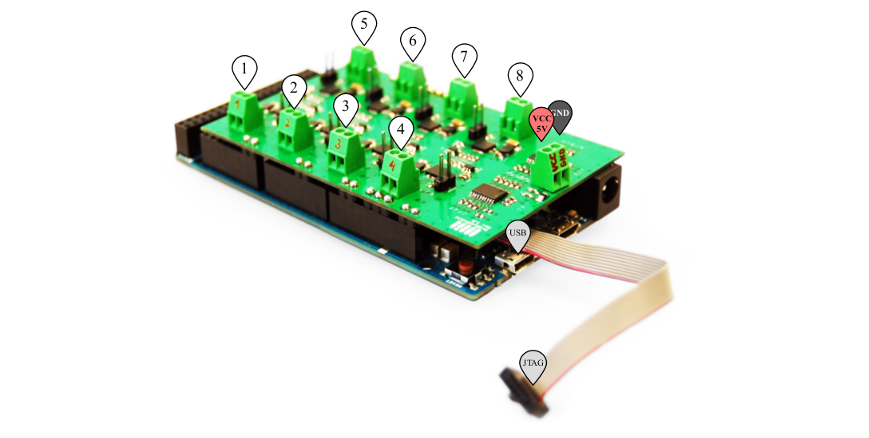
To create the hardware I used eight piezoelectric haptic feedback drivers (DRV2667), which can create an output voltage of about 200 VPP, can be controlled via I2C and have an internal 2 kB RAM. I used an Arduino Due as a platform to create a breakout board, which was available in the Media Interaction Lab. Furthermore, the project PyzoFlex was build upon the Arduino Due and the haptic feedback could haven been combined with PyzoFlex in a next hardware revision.
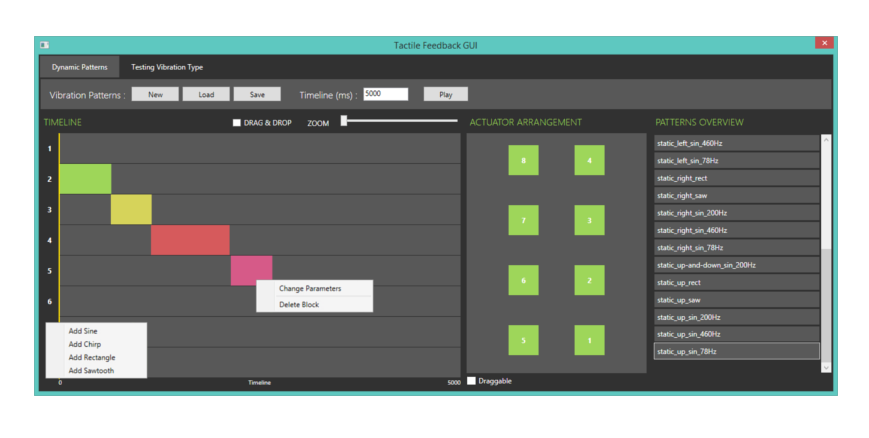
The firmware for the Arduino Due was written using the Atmel Studio 6, because it offered better debug possibilities, then the Arduino IDE. The Arduino Due was controlled via a software written in C# (WPF), which offers a timeline to create different vibration patterns. Those commands are then send via USB to the Arduino Due which controlled the eight haptic feedback driver.
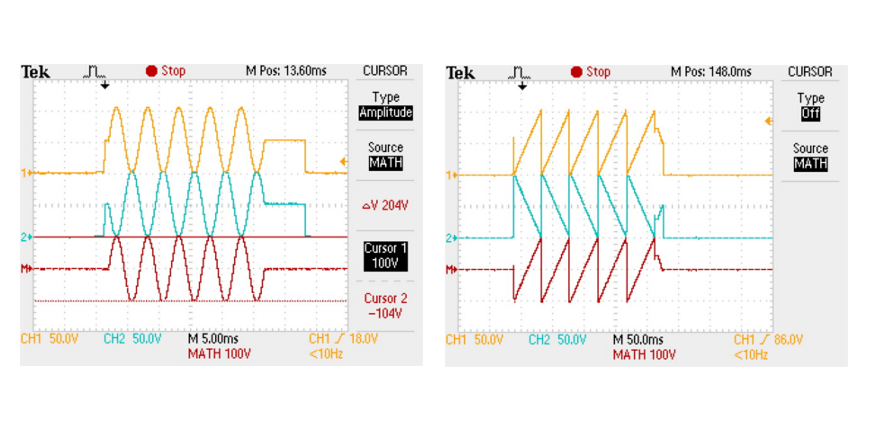
The conclusion of my master thesis was: A localized haptic feedback on a rigid material like glass is possible if the vibration has only a view cycles and the frequency is around 200 Hz. What happens, when the surface gets oscillated by to long vibrations can be seen in the following impressive links here and here. Therefore, to make it possible fingers must be positioned on top of the vibration source, covered beneath glass or a soft layer. But positioning the hand on top of a complete surface seems to be artificial. Therefore, the piezo elements were mounted on a sheet of plastic around the wrist to create a continuous contact with the skin. With this construction it was possible identify the direction of the vibration, movements of the vibration around the wrist and different vibration patterns like sinus, rectangle, chirp and sawtooth.